连接 Femto Bolt 及 Femto Mega
在使用 DEEP 前,请先使用一下步骤确认 Femto 正常连接并可以进行骨骼识别。
确认摄像头正常工作
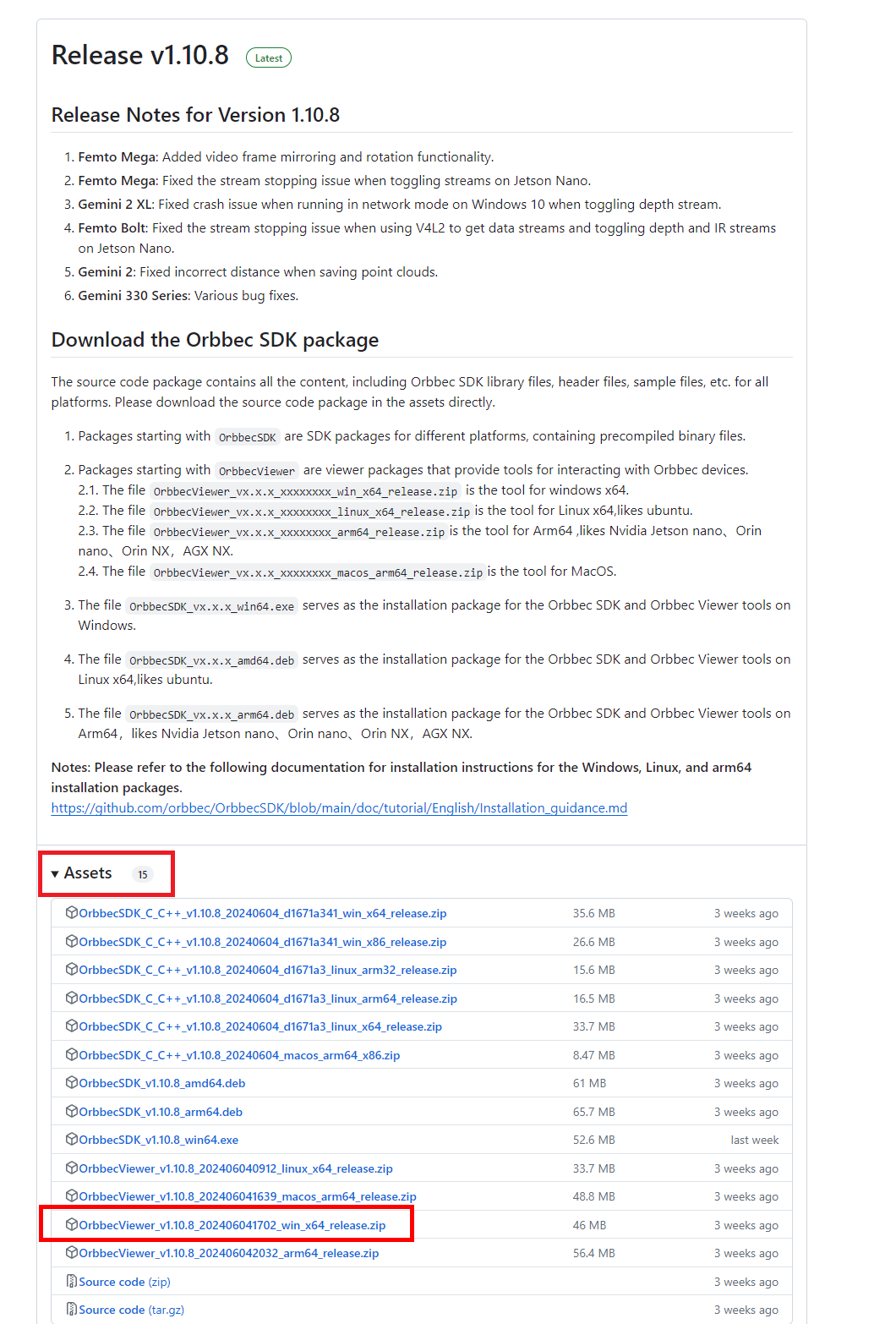
下载并运行 OrbbecViewer
https://github.com/orbbec/OrbbecSDK/releases
网盘下载
如果您无法打开上述连接,可以在以下网盘下载,
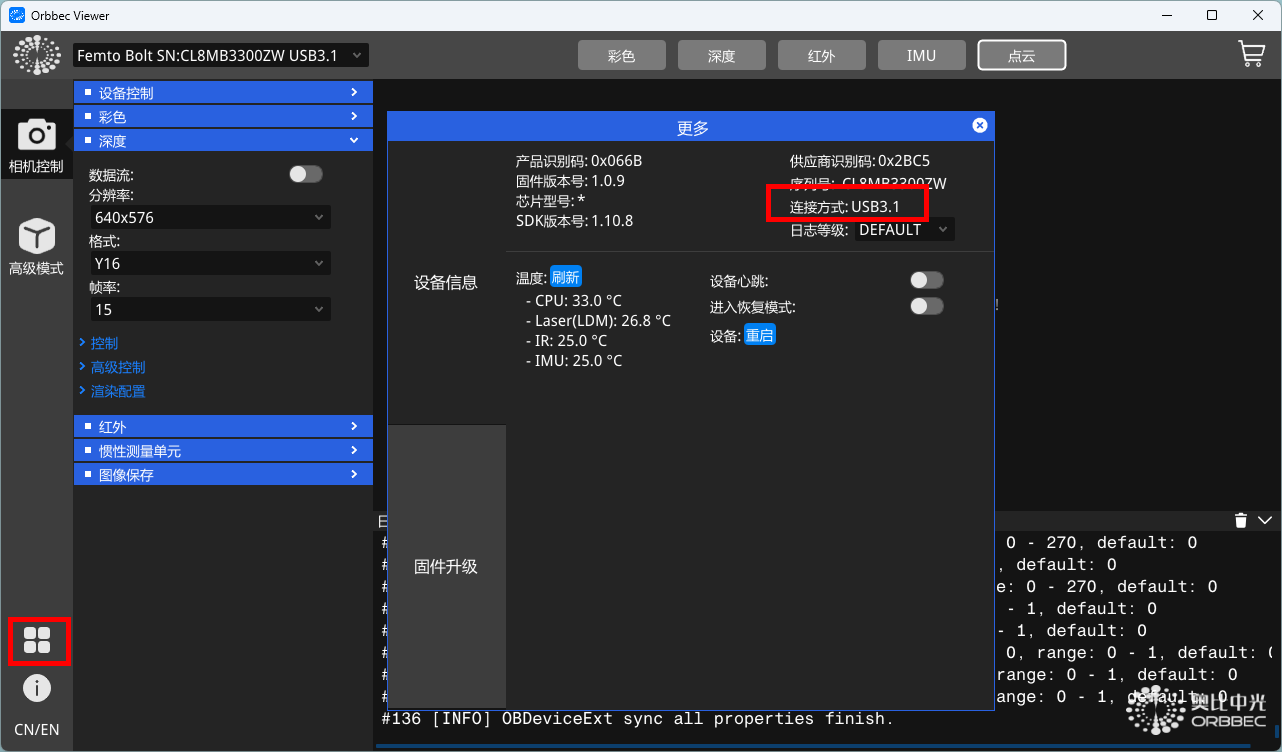
点击左下方四角,在弹出的更多对话框中确认连接方式为 3.1。
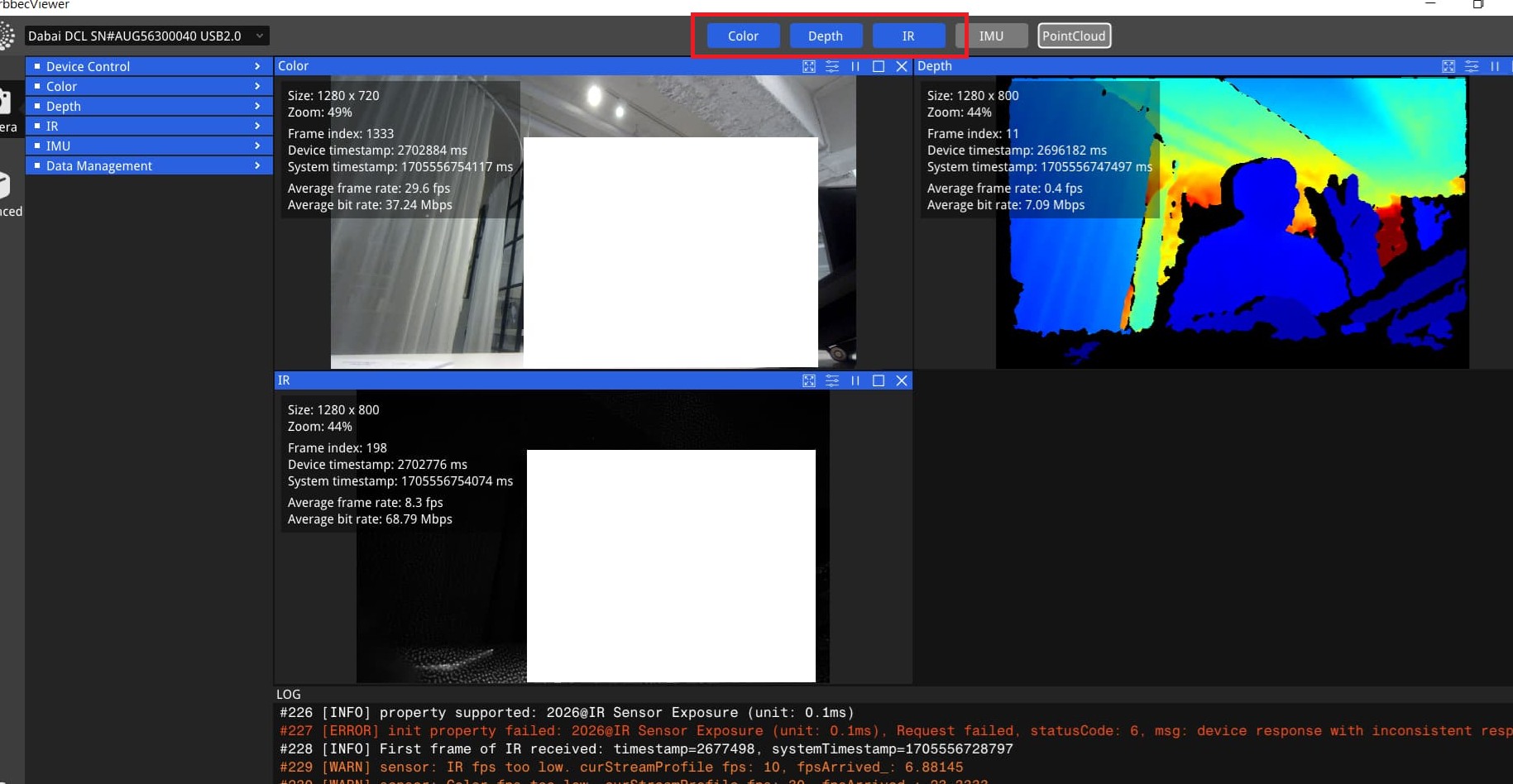
点选上方按钮,确认各相机可以正确输出。
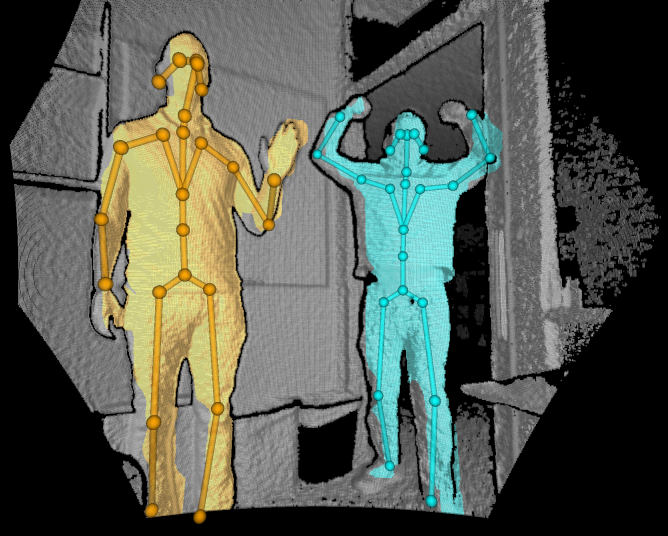
确认骨骼追踪正常工作
下载 Azure Kinect Body Tracking SDK 并安装
(来自 https://github.com/orbbec/Azure-Kinect-Samples )
网盘下载
如果您无法打开上述连接,可以在以下网盘下载,
解压缩后,运行 Azure Kinect Body Tracking SDK\tools\k4abt_simple_3d_viewer,确认有人体骨骼输出。